Historia de la Sala de medidas de funciones HRTF en el ITC
Desde el mes de Mayo de 2000 nuestro proyecto cuenta con instalaciones en la sede del Instituto Tecnológico de Canarias en Santa Cruz de Tenerife. Las instalaciones consisten en un despacho cuádruple que se ocupa por miembros de nuestro equipo en ese momento, además de una nave industrial.

Un año después, en Mayo de 2001, se concluyen las obras de montaje de la Cámara Acondicionada Acústicamente (o sala anecoica) que ocupa la nave industrial de 8x4x4 metros.


En Enero de 2002 se instala un robot en la sala anecoica, que servirá para facilitar la medida de las funciones HRTF y ganar precisión en ellas.



En diciembre de 2002 colocamos la plataforma giratoria en la que irá situada la silla. Además de la lógica dificultad para mover una estructura de tanto peso, la principal dificultad era situar la mesa, con la mayor precisión posible, en la línea perpendicular que pasa por el centro del altavoz. El objetivo es que el centro de la cabeza del voluntario al que se le mida la HRTF esté en la línea del centro del altavoz.


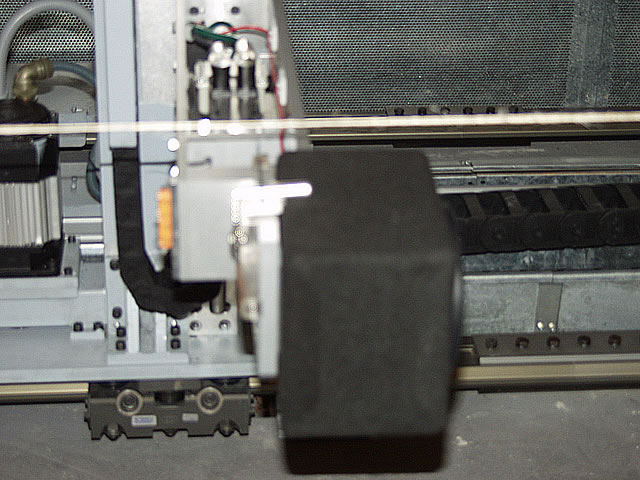
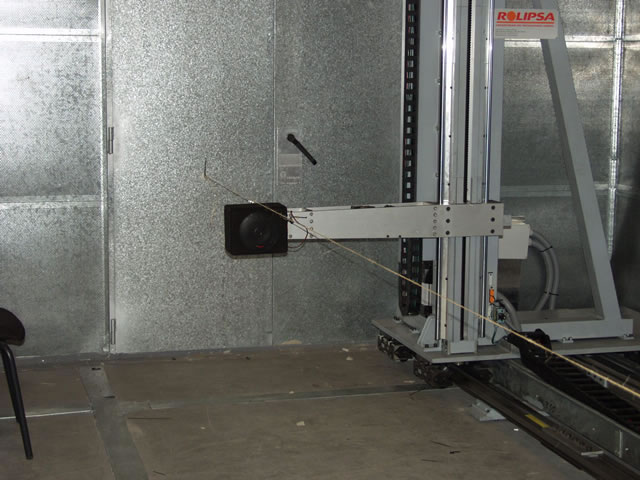
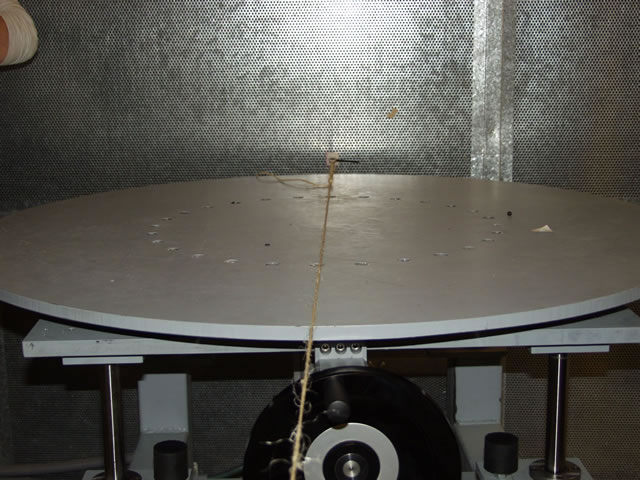
Para encontrar la posición correcta del centro de la mesa disponíamos de un puntero láser situado en el centro del altavoz. La proyección de su luz sobre la pared tendría que indicarnos de forma exacta dónde debería ir colocada la mesa. Sin embargo, encontramos un problema importante de deriva en el haz de luz proyectado, posiblemente debido a que el puntero láser se movía ligeramente cada vez que se usaba, de manera que optamos por utilizar una simple cuerda para encontrar el punto de la pared que está situado inmediatamente enfrente del centro del altavoz. Para ello marcamos con la cuerda el recorrido del centro del altavoz cuando éste se desplazaba por toda la longitud del rail de nuestro robot, que es accionado mediante un mando a distancia. Una vez encontrado el punto correcto, movimos la plataforma hasta conseguir que la línea marcada por la cuerda pasara por su centro.
Durante el mes de abril de 2003 se procedió a la instalación de la silla en su correspondiente plataforma.


Inicio | Resumen | Historia | Instituciones | Equipo | Investigación | Desarrollo | Documentación | Patente | Multimedia | Noticias | FAQs