Desarrollo
Prototipo Portátil EAV

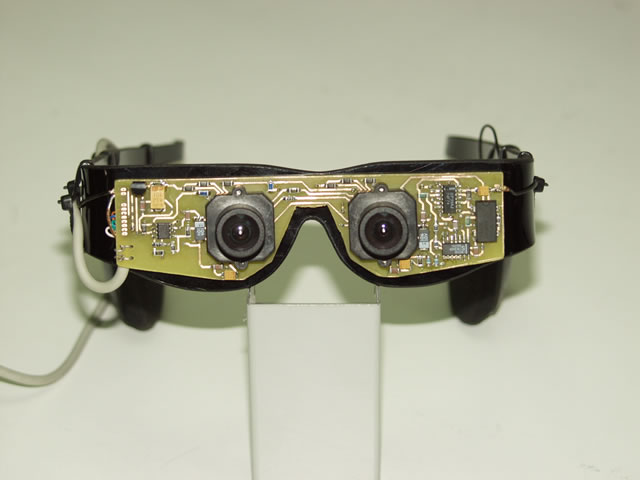
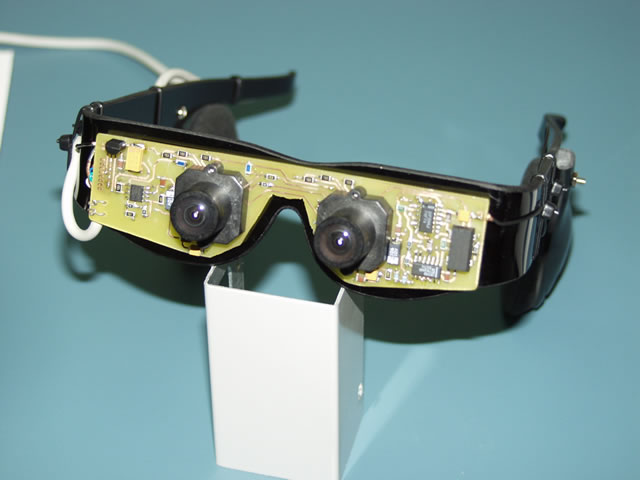
El sistema de percepción (audiogafas) es un dispositivo que le permite a la persona ciega percibir cómo está físicamente organizado el espacio que le rodea, presentándole un conjunto de fuentes sonoras virtuales ubicadas en los objetos que hay a su alrededor. Está compuesto de unas gafas similares a las convencionales que se llevarán puestas, unidas por un cable a un procesador que se porta en la cintura o en un bolso. Las dimensiones y peso de este procesador son tales que resulta cómodo portarlo, al estilo de un "walkman".
Las gafas llevan una pareja de cámaras de video miniatura, a partir de cuyas imágenes el procesador calcula las distancias hasta los objetos, y genera los sonidos correspondientes a la situación en la que existieran fuentes sonoras ubicadas en esos objetos, los cuales han sido calculados específicamente para el usuario mediante el uso de sus funciones de transferencia HRTF. Esos sonidos se presentan a la persona ciega mediante unos auriculares que también forman parte de las gafas.
El sistema desarrollado puede separarse desde el punto de vista conceptual en tres subsistemas:
-Subsistema de Captación: Su misión es obtener una evaluación cuantitativa del entorno físico del deficiente visual (ó voluntario).
-Subsistema de Generación de Sonidos: Su misión es la de producir, combinar y llevar hasta el usuario los sonidos que correspondan.

- Subsistema de Control y Usuario: Se encarga de la organización de los dos primeros, orientado todo ello a que dichos sonidos puedan generar una percepción de dicho entorno.

El subsistema de captación o sistema de visión artificial registra las formas del entorno del sujeto mediante dos microcámaras de vídeo situadas en la cabeza a la altura de los ojos, colocadas adecuadamente sobre un soporte diseñado al efecto. La señal de estas cámaras se conduce mediante cables hasta el subsistema que procesa la información y obtiene una descripción informática de dicho entorno, utilizando para ello los algoritmos de visión artificial y funcionando en tiempo real, es decir, extrayendo del orden de diez mapas de profundidades por segundo.
El sistema de generación de sonidos que con la información de la estructura del entorno, generada por el subsistema anterior y siguiendo las reglas que se hayan establecido para asociar distancias y posiciones a fuentes sonoras, es capaz de crear la percepción de que cada uno de esos sonidos proviene (está localizado) del lugar que ha indicado la captación del entorno, a través de unos auriculares que también forman parte del soporte que la persona ciega porta, y utilizando para ello las funciones de transferencia descriptivas de la cabeza (HRTF) que se han medido previamente para cada sujeto en particular.
El espacio reconocido mediante estereovisión debe ser digitalizado hasta que alcance la forma de bloques físicos, ya que es necesario discretizarlo para que sea manejable electrónica/informáticamente. A tal efecto se trabaja con un sistema de coordenadas esféricas, cuyo centro es la cabeza del sujeto, y del que únicamente reviste interés el casquete esférico que se encuentra inmediatamente delante del individuo. Dicho casquete se descompone en "estereopixeles", cada uno de los cuales tendrá un valor de profundidad determinado por el espacio que rodea al sujeto, y también podrá tener asociadas en el futuro propiedades físicas de interés, como el nivel de intensidad luminosa, el color, la textura, etc.

Actualmente se trabaja en la adaptación del prototipo portátil a la constitución física del usuario, intentando minimizar su peso y estudiando la adaptación de las gafas a las diferentes dimensiones craneales de las personas. Asimismo, se intenta adaptar su funcionamiento según sean las características del entorno (luminosidad variable, complejidad variable, entornos ruidosos,....) y se estudia la mejora en aspectos tales como la facilidad de su puesta en funcionamiento, el tiempo que tarda en ponerse en funcionamiento, la facilidad de colocación, mejora estética, seguridad, salubridad y autonomía de funcionamiento.

Mejoras en el prototipo portátil.
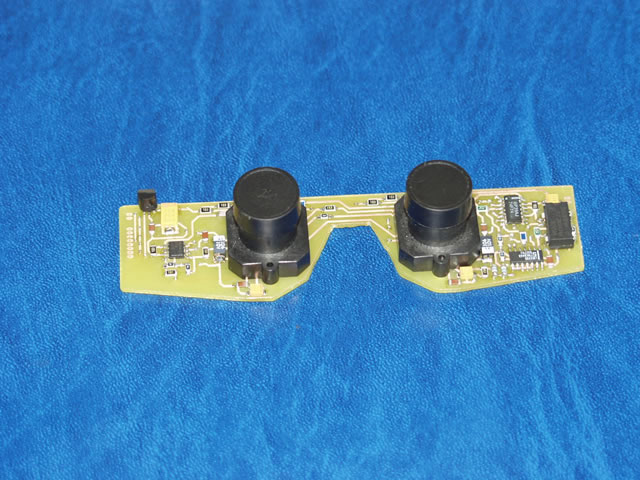
En noviembre de 2002 se realizaron con éxito las pruebas del nuevo prototipo de la unidad de cámaras del EAV. En este nuevo prototipo, realizado por José Vicente Gigante y Agustín Casanova, se ha logrado integrar toda la electrónica de control de las microcámaras en un circuito del tamaño adecuado para ser montado en las gafas, simplificando también el cableado de las mismas hacia la unidad procesadora. Servirá de base para la construcción de una nueva electrónica aún más reducida para que pueda ser integrada en un modelo de gafas mas pequeñas para uso infantil.

El 18 de diciembre de 2002 se realizaron pruebas perceptuales con Candelaria Darias, usando el nuevo prototipo portátil en construcción. El objetivo era verificar el correcto funcionamiento del software y de la unidad. Se comprobó la correcta espacialización de los sonidos y la capacidad de la voluntaria para localizar objetos en azimut, altura y profundidad con este nuevo prototipo y con diferentes auriculares.
 Desde el ordenador se le envían sonidos a Candelaria, simulando que
hay una fuente de sonido que ella debe reconocer. Se controla el stereopixel
donde debe estar la fuente virtual, así como la profundidad a la que
se debería encontrar.
Desde el ordenador se le envían sonidos a Candelaria, simulando que
hay una fuente de sonido que ella debe reconocer. Se controla el stereopixel
donde debe estar la fuente virtual, así como la profundidad a la que
se debería encontrar.
 Candelaria identifica la
fuente virtual de sonido, señalándola y diciéndonos a
qué distancia se encuentra.
Candelaria identifica la
fuente virtual de sonido, señalándola y diciéndonos a
qué distancia se encuentra.





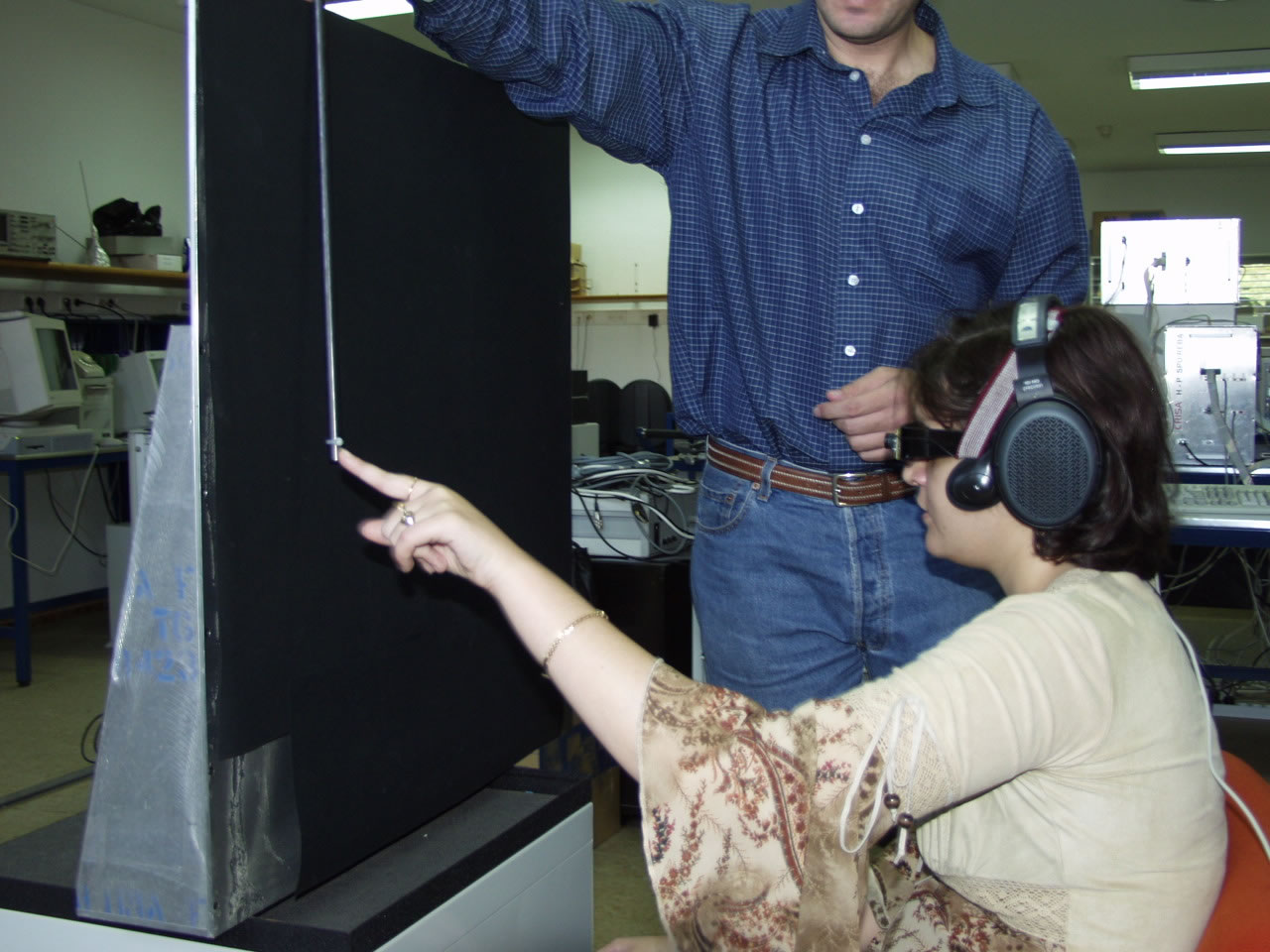
En esta secuencia de imágenes podemos ver cómo Candelaria señalaba la posición de los objetos que se le presentaban. También fue capaz de reconocer sus formas y sus dimensiones, todo esto teniendo en cuenta la precisión con que la resolución del sistema le permitía hacerlo.
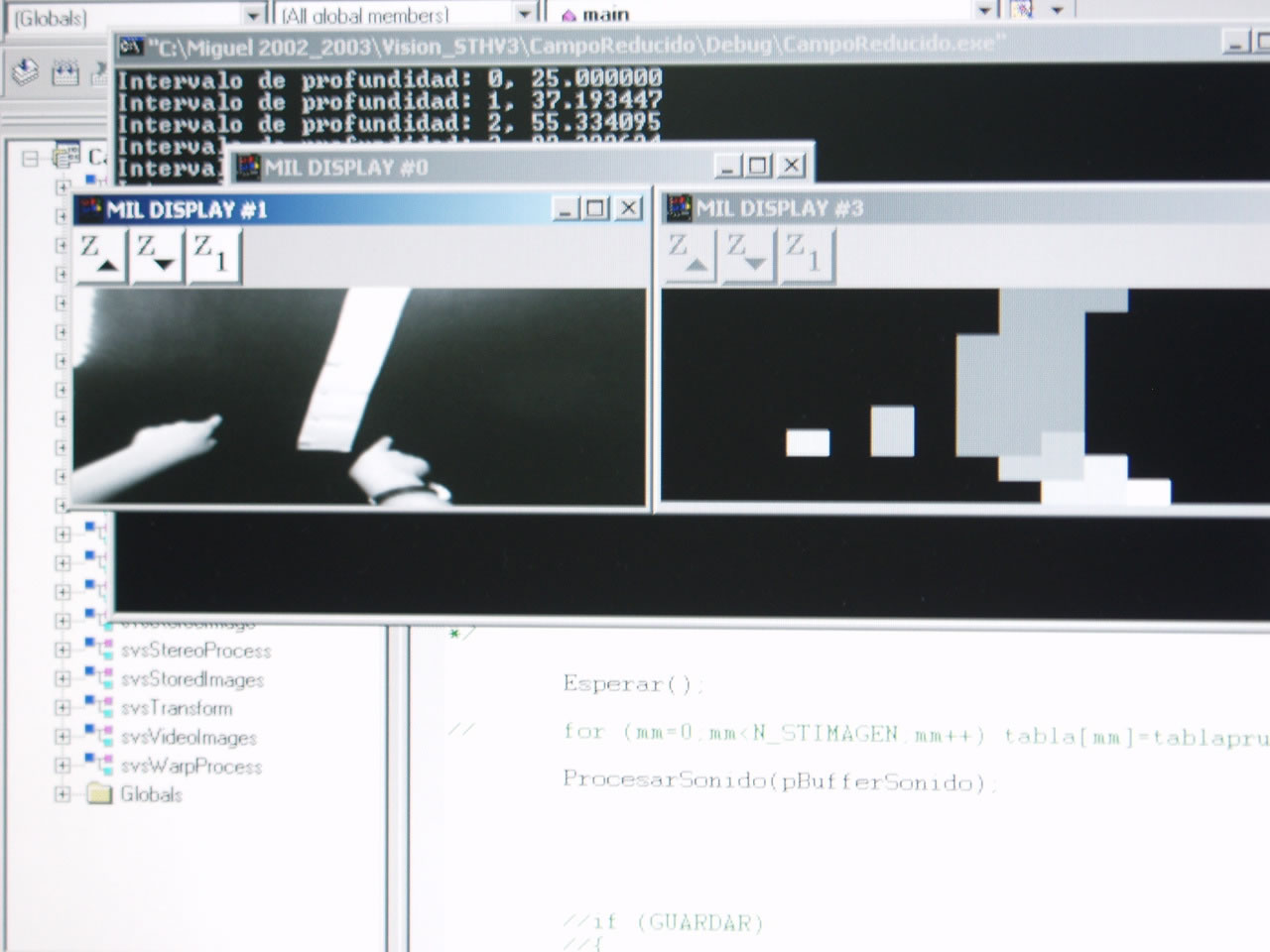 Captura
de la pantalla del ordenador, en la que se puede apreciar la imágen
real captada por las cámaras (izquierda) y la imagen traducida a stereopíxeles
(derecha).
Captura
de la pantalla del ordenador, en la que se puede apreciar la imágen
real captada por las cámaras (izquierda) y la imagen traducida a stereopíxeles
(derecha).
Aquí podrá encontrar información actualizada sobre nuestro nuevo prototipo.

Inicio | Resumen | Historia | Instituciones | Equipo | Investigación | Desarrollo | Documentación | Patente | Multimedia | Noticias | FAQs