ITC's HRTF Measurements Room History
Since May 2000 our project counts on facilities in the seat of the Technological Institute of the Canary Islands in Santa Cruz de Tenerife. The facilities consist of a quadruple office occupied by members of our team, in addition to an industrial building.

A year later, in May of 2001, the works of assembly of the Acoustic Equipped Camera Acoustic (or anechoic room), that occupies the industrial bulding of 8x4x4 meters, conclude.


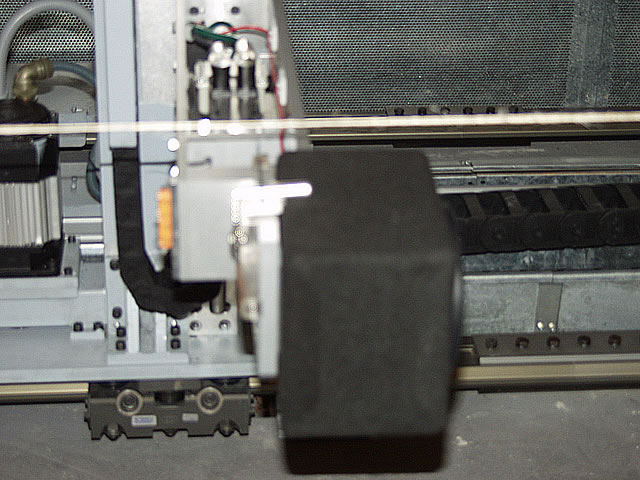
In January of 2002 a robot in the anechoic room settles, that will serve to facilitate the measurement of HRTF functions and to gain precision in them.




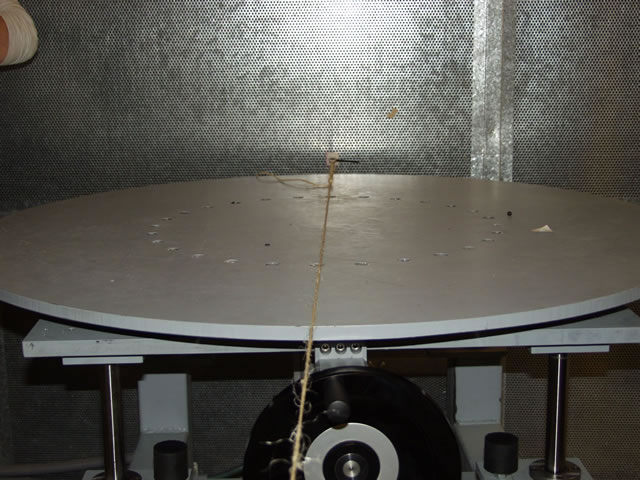
In December of 2002 we placed the spin table in which it will go located the chair. In addition to the logical difficulty to move a structure of as much weight, the main difficulty was to locate the table, with the greater possible precision, in the perpendicular line through the center of the loudspeaker. The objective is that the center of the volunteer's head is in the line of the center of the loudspeaker.


In order to
find the correct position of the center of the table we had a laser located
in the center of the loudspeaker. The projection of its light on the wall would
have to exactly indicate where the table have to go placed. Nevertheless, we
found an important problem of drift in the projected beam of light, possibly
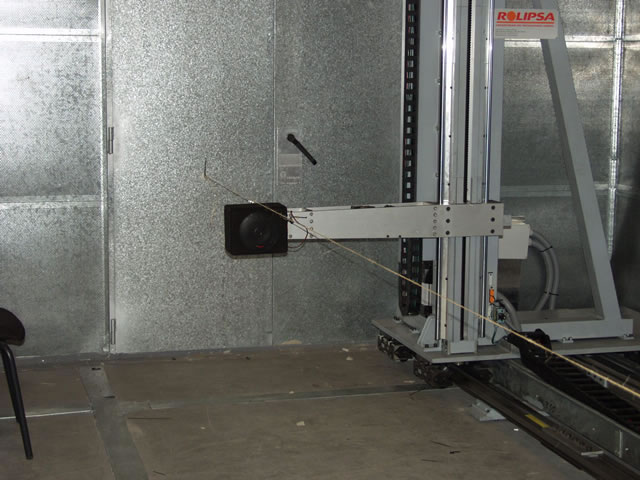
because the laser moved slightly whenever it was used, so that we chose to use
a simple cord to find the point of the wall that is located immediately opposite
of the center of the loudspeaker. We marked with the cord the route of the center
of the loudspeaker when this one moved by all the length of the rail of our
robot, that is driven by a remote control. Once found the correct point, we
moved the platform until obtaining that the line marked by the cord passed through
its center.
During april of 2003 the chair was installed at the spin table plataform.

Home | Summary | History | Instituciones | People | Research | Development | Documentation | Patent | Multimedia | News | FAQs