Development
EAV Portable Prototype

The perception system is a device that allows to the blind person to perceive how the surrounding space is physically organized, presenting a set of located virtual sonorous sources in the objects. It is compound of conventional glasses (similar to a conventional ones) that the person will wear, united by a cable to a processor that is carried on the waist or in a purse. The dimensions and weight of this processor are such that is comfortable to carry it, in the style of "walkman".
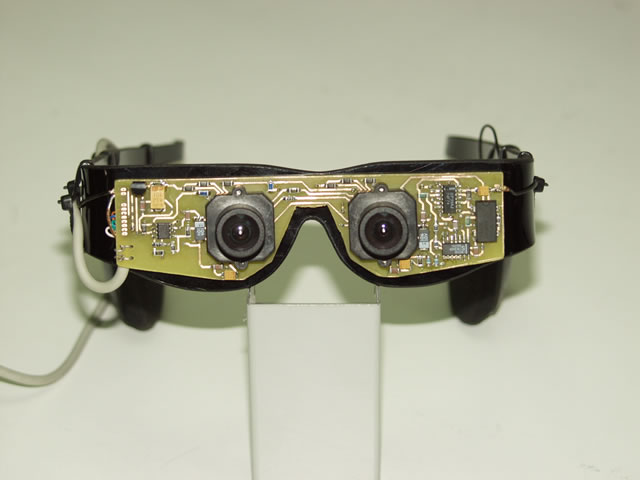
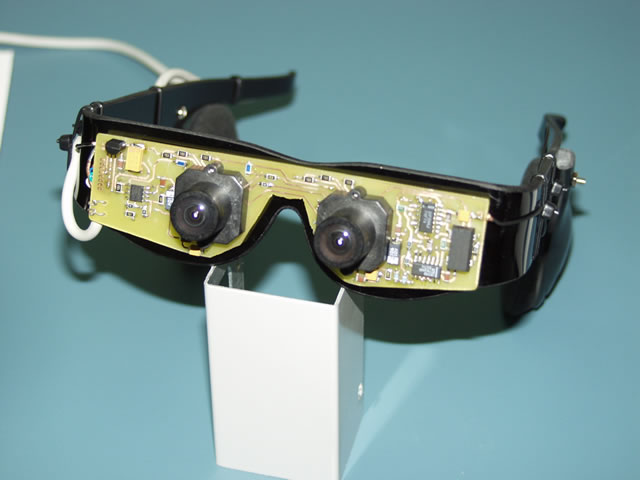
The glasses have a pair of miniature camcorders miniature, from whose images the processor compute the distance to the objects, and generates the sounds corresponding to the situation in which located sonorous sources in those objects exists, which have been calculated specifically for the user by means of his HRTF functions. Those sounds appear to the blind person throungh earpieces that are part of the glasses.
The developed system can be separated, from the conceptual point of view, in three subsystems:
- Data acquisition Subsystem: Its mission is to obtain a quantitative evaluation of the physical surroundings of the blind person (or voluntary) line of sight.
- Sound Generation Subsystem: Its mission is to produce, to combine and to present to the user the sounds that corresponds.

- Control and User Subsystem: It is in charge of the organization of the two usbsistems above, orienting it to that these sounds can generate a perception of the surroundings.

The data acquisition subsystem of machine vision registers the forms of the surroundings through two camcorders located in the head at the height of the eyes, placed on a support designed to the effect. The signal of these cameras is conducted by cables to the subsystem that processes the information and obtains a computer description of this surroundings, using for it machine vision algorithms and working in real time, that is to say, extracting an order of ten maps of depths per second.
The sound generation subsystem that, with the information of the surroundings structure generated by the previous subsystem and following the rules that have been settled down to associate distances and positions to sonorous sources, is able to create the perception from which each one of those sounds comes (it is located) from the place that the data acquisition from the surroundings has indicated, through earpieces that also are part of the support that the blind person carries, and using for it the descriptive head related transference funcions (HRTF) that have been previously measured for each individual.
The space recognized by means of stereovision must be digitized until it reaches the form of physical blocks, since it is necessary to discretize it so that it is electronicaly manageable. To this end one works with a system of space polar coordinates, whose center is the head of the subject, and in which only the spherical cap that is immediately in front of the individual has interest. This cap consists in "stereopixels". Each one of tham will have a depth value determined by the space that surrounds to the individual, and in the future also will be able to have associate physical properties of interest, like the level of light intensity, the color, the texture, etc.

At the moment we work in the portable prototype adatation to the physical constitution of the user, trying to diminish its weight and studying the adaptation of the glasses to different craneal dimensions. Also, we try to adapt its operation according to the characteristics of the surroundings (variable luminosity, variable complexity, noisy surroundings....) and we are studying the improvement in aspects such as the facility of its put into operation, the time that takes in putting itself into operation, the facility of positioning, aesthetic improvement, security, salubrity and operationautonomy.

Improvements in the portable prototype.
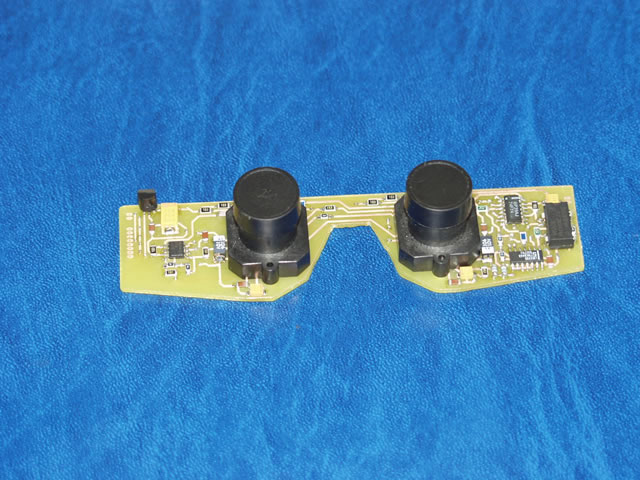
In November of 2002 the tests of the new prototype of the cameras unit were made successfully. In this new prototype, made by Jose Vicente Gigante and Agustín Casanova, all the microcameras control electronics has been integrated in a circuit of adapted size to be mounted in the glasses, also simplifying the wiring of it towards the processor unit. It will represent a base for the construction of still more reduced new electronics, so that it can be integrated in a model of small glasses but for infantile use.

On the 18 of December of 2002 we did perceptual tests with Candelaria Darias, using the new portable prototype in construction. The objective was to verify the correct operation of the software and the unit. The correct externalization of sounds and the capacity of the volunteer to locate objects in azimuth, height and depth with this new prototype and different earpieces was verified.
 The sounds were sent to Candelaria from the computer, simulating that there
was a sound source that she had to recognize. The stereopixel where it must
be the virtual source was controlled, as well as the depth at which it would
be.
The sounds were sent to Candelaria from the computer, simulating that there
was a sound source that she had to recognize. The stereopixel where it must
be the virtual source was controlled, as well as the depth at which it would
be.
 Candelaria identifica la
fuente virtual de sonido, señalándola y diciéndonos a
qué distancia se encuentra.
Candelaria identifica la
fuente virtual de sonido, señalándola y diciéndonos a
qué distancia se encuentra.





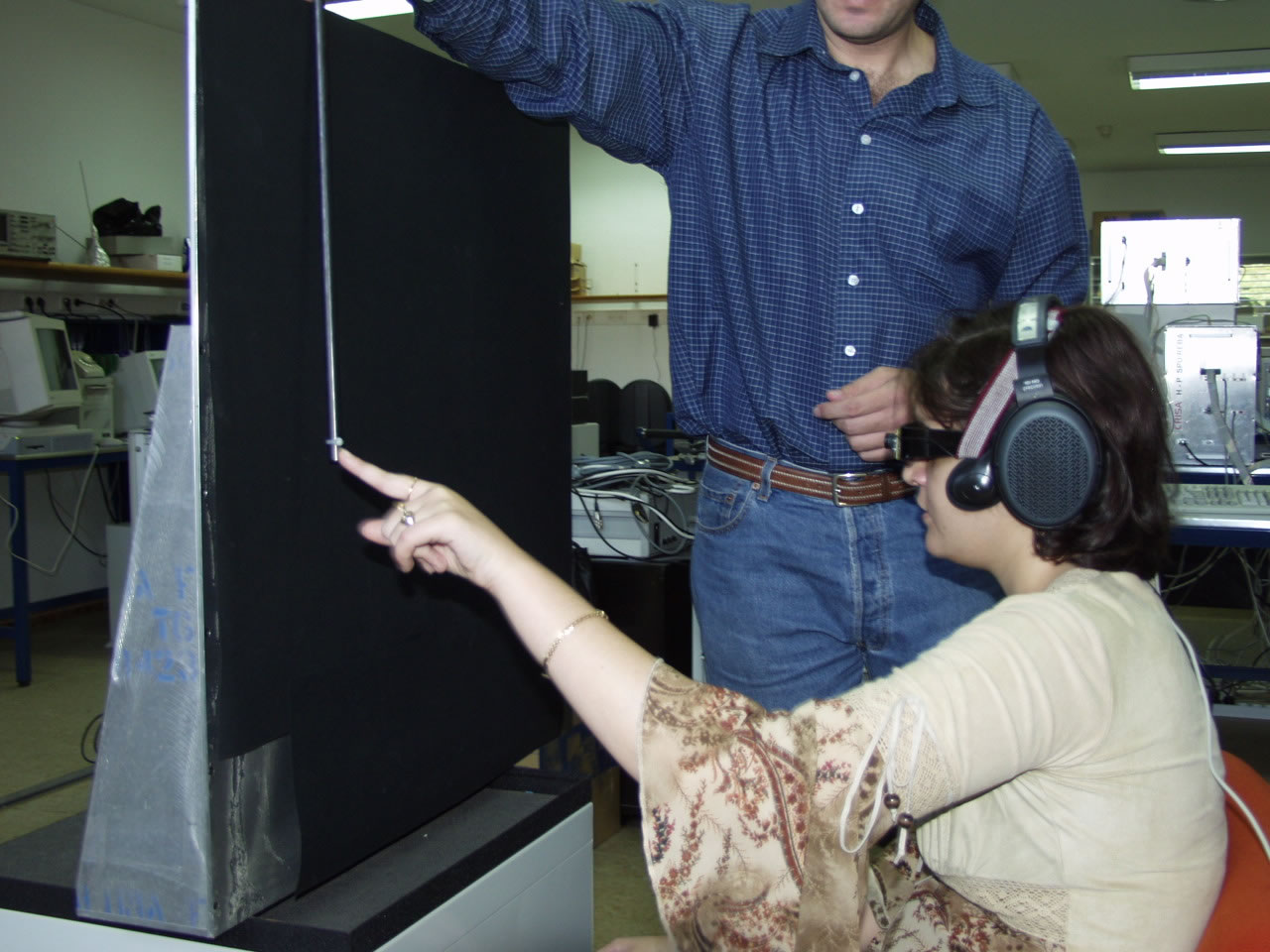
In this images sequence we can see how Candelaria indicated the position of the objects that appeared to her. She was able to recognize its forms and their dimensions, all this considering the limits imposed by the resolution of the system.
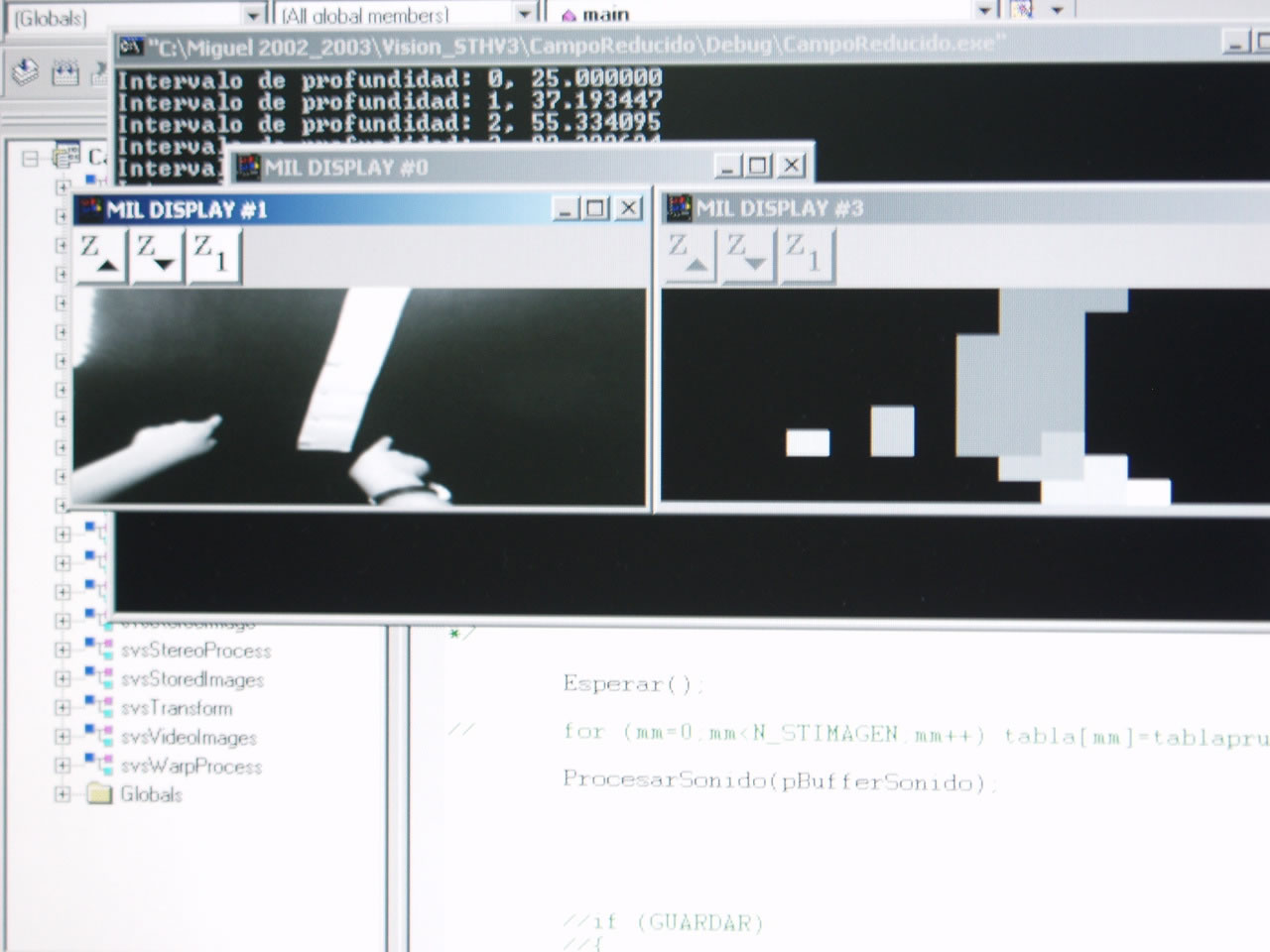 Computer's
screen capture, in which can be appreciated the real image captured by the
cameras (left) and the image translated to stereopixels (right).
Computer's
screen capture, in which can be appreciated the real image captured by the
cameras (left) and the image translated to stereopixels (right).
Here you can find actualized information about our new prototype.

Home | Summary | History | Instituciones | People | Research | Development | Documentation | Patent | Multimedia | News | FAQs